Muy buenas, aquí Martín en su blog. En esta ocasión vamos a desarrollar los apuntes de tecnología del tercer trimestre sobre el robot siguelíneas. Empecemos pues.
Para hacer funcionar el robot necesitamos un controlador de motor. Concretamente un modelo L298N.
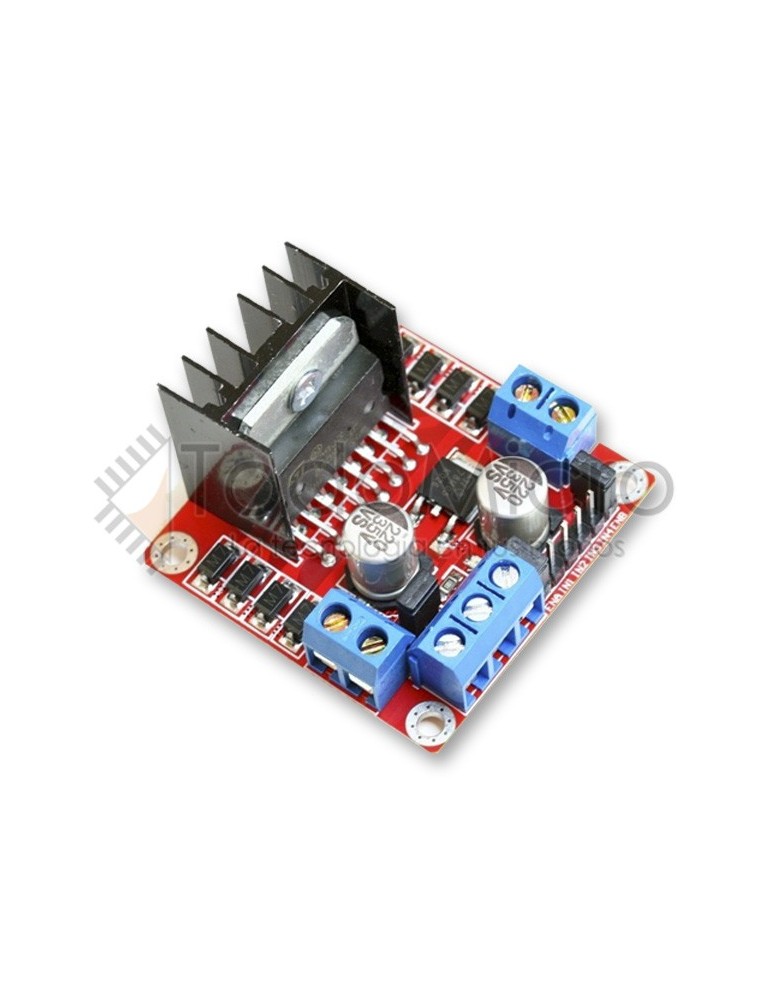
Bien. Este controlador hace dos funciones, las cuales son:
-regular la potencia del circuito
-cambiar el sentido del giro del robot.
El controlador de motor no puede regular el giro solo. Necesita un componente llamado jumper. El jumper (lo que serían los motores A y B) controlan la velocidad (su encendido y apagado). Esto querría decir que, gracias a el número de la velocidad que podemos escribir en el código, podemos hacer que el coche se mueva más despacio o más rápido. La salida es de 0 a 255.
Ahora es momento de hablar de los responsables de hacer girar al coche. (in 1,2,3 y 4), que son los que hacen que el vehículo se mueva en varias direcciones (marcha alante, marcha atrás, izquierda o derecha). El motor A controla in 1 e in 2, mientras que el motor B controla in 3 e in 4. Para hacer que el robot gire, se debe tener en cuenta que, si in 1 y 2 están encendidos al mismo tiempo no giraría. Lo que se debe hacer para que gire hacia la izquierda sería encender solo el in 1 y apagar el in 2. Para que gire a la dereha se debería encender el in 2 y apagar el in 1.
A continuación va una lista de dónde hay que conectar cada componente en el controlador de motor para hacer que el coche funcione:
-en A debe de ir a la entrada 5
-en B debe de ir a la entrada 6
-in 1 debe de ir a la entrada 10
-in 2 debe de ir a la entrada 11
-in 3 debe de ir a la entrada 13
-in 4 debe de ir a la entrada 14
Eso ha sido todo lo que respectaban los apuntes y el curso. Esa es la teoría para hacer funcionar el código del robot siguelíneas en parte.
Hemos terminado la tercera evaluación, y con ello el curso. Me despido indefinidamente de este blog, ¿pero quién sabe? Puede que regrese próximamente...
Para hacer funcionar el robot necesitamos un controlador de motor. Concretamente un modelo L298N.
Bien. Este controlador hace dos funciones, las cuales son:
-regular la potencia del circuito
-cambiar el sentido del giro del robot.
El controlador de motor no puede regular el giro solo. Necesita un componente llamado jumper. El jumper (lo que serían los motores A y B) controlan la velocidad (su encendido y apagado). Esto querría decir que, gracias a el número de la velocidad que podemos escribir en el código, podemos hacer que el coche se mueva más despacio o más rápido. La salida es de 0 a 255.
Ahora es momento de hablar de los responsables de hacer girar al coche. (in 1,2,3 y 4), que son los que hacen que el vehículo se mueva en varias direcciones (marcha alante, marcha atrás, izquierda o derecha). El motor A controla in 1 e in 2, mientras que el motor B controla in 3 e in 4. Para hacer que el robot gire, se debe tener en cuenta que, si in 1 y 2 están encendidos al mismo tiempo no giraría. Lo que se debe hacer para que gire hacia la izquierda sería encender solo el in 1 y apagar el in 2. Para que gire a la dereha se debería encender el in 2 y apagar el in 1.
A continuación va una lista de dónde hay que conectar cada componente en el controlador de motor para hacer que el coche funcione:
-en A debe de ir a la entrada 5
-en B debe de ir a la entrada 6
-in 1 debe de ir a la entrada 10
-in 2 debe de ir a la entrada 11
-in 3 debe de ir a la entrada 13
-in 4 debe de ir a la entrada 14
Eso ha sido todo lo que respectaban los apuntes y el curso. Esa es la teoría para hacer funcionar el código del robot siguelíneas en parte.
Hemos terminado la tercera evaluación, y con ello el curso. Me despido indefinidamente de este blog, ¿pero quién sabe? Puede que regrese próximamente...
Comentarios
Publicar un comentario